danielljeon.github.io
Info & Docs
About me: danielljeon.
Personal notes: docs.
Full Projects
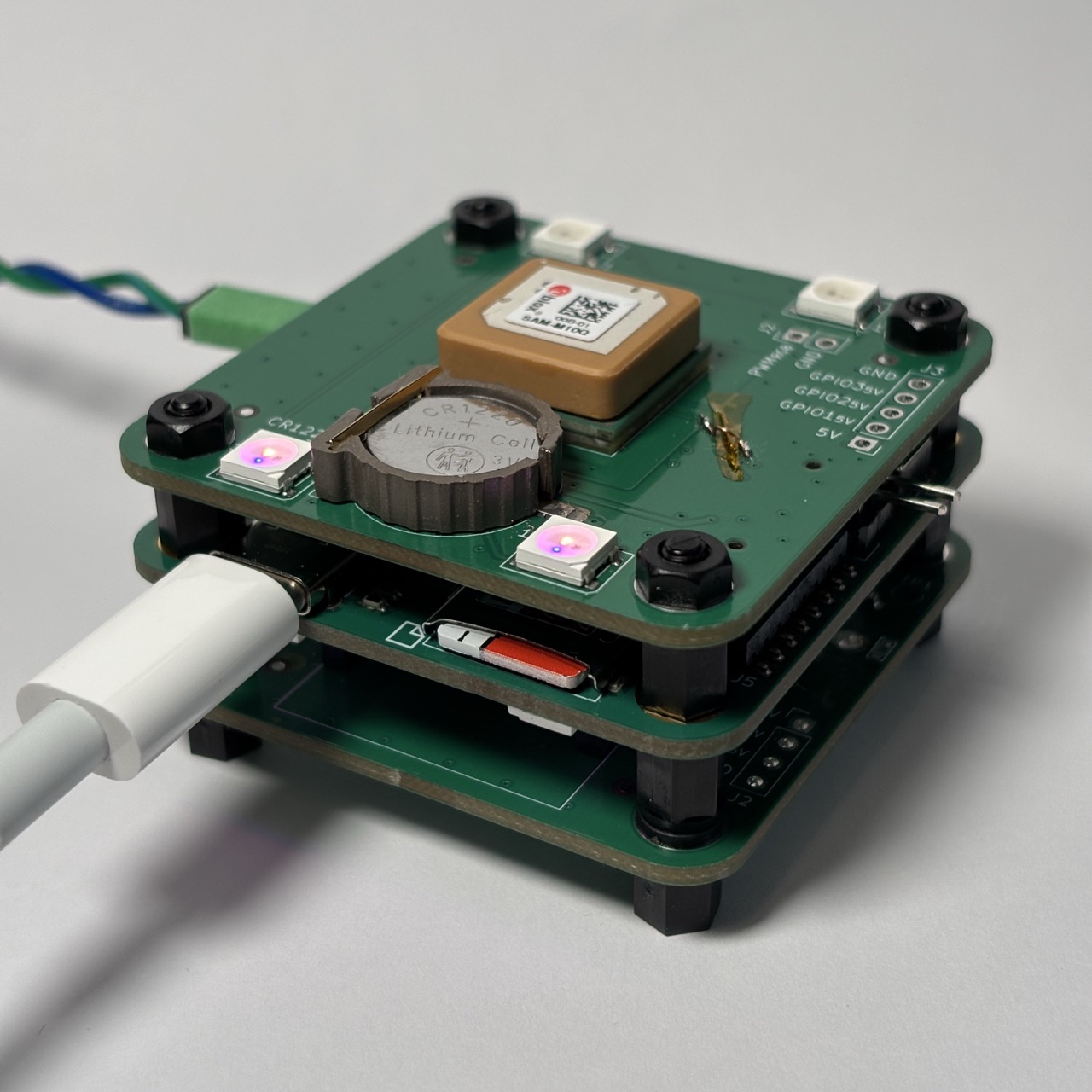
Nerve: 6-DOF Flight Controls
🚀 Nerve is a general-purpose controller designed for six degrees of freedom (6-DOF) operation. Originally developed for jet vane rocket controls, it now serves as a testbed for robotics and controls development.
Note: This project was prematurely stopped due to shifting priorities. No full rocket-flight or realistic controls testing was attempted.
- Printed Circuit Board (PCB) design:
- 4-layer, 6-layer, design for manufacturing and assembly.
- Low-level embedded firmware (STM32F446RE):
- Timers, DMA, NVIC, SDIO, CAN (classic), I2C, SPI, UART, etc.
- Sensors and Wireless Modules:
- Barometer, GNSS, Inertial Measurement Unit (IMU) and XBee.
| Nerve Stack | Nerve Stack with Enclosure |
|---|---|
 |
 |
Firmware:
- nerve: Firmware for CAN-based control systems dev platform.
Hardware:
-
nerve_pcb: PCB for CAN-based control systems dev platform.
-
nerve_gps_pcb: GPS module to
nerve_pcb. -
nerve_radio_pcb: Radio and power supply module to
nerve_pcb. -
nerve_ada_board: Nerve dev board using off-the-shelf modules.
Additional Software/Hardware:
- gopher: Ground station for Nerve
controller system.
- Previously a Python desktop application for telemetry via XBee radios.
Interesting Academic and Small Projects
Soft Robotic Gripper: Software driven CAD
🎈 Pneumatic gripper project focusing on silicone mold design automated with software for rapid design flexibility.
- Compliant manipulators.
- CAD and FEA analysis.
- Python STL file manipulation.
soft_solution: software and documentation.
Robotic Hand: 5 DOF Humanoid Hand Prototype
🤌 Robotic hand project for actuators/power electronics and sensors/instrumentation university courses.
- Printed Circuit Board (PCB) design.
- Low-level embedded firmware (STM32F446RE).
- PSpice (buck circuit) simulation:
- Basic transient modeling.
- Fast Fourier Transform (FFT).
- robotic_hand: firmware.
- robotic_hand_pcb: PCB hardware.
- robotic_hand_wireless: XBee wireless telemetry display desktop application.
Maze Bot: Terrain and Maze Solving Robot
🐁 Terrain and maze solving robot for mechatronics design university course.
- Closed cloop control systems:
- Bilinear transform z-domain PIDs.
- Yaw rate control, heading control and linear position control.
- Low-level embedded firmware (STM32L432KC).
- Robotic orientation frames (quaternion).
- maze_bot: firmware.
- maze_bot_pcb: electronic schematics (PCB not permitted by project rules).
Drop Detect: FreeRTOS Soldering Iron Drop-Triggered Shield
🛡️ Soldering iron drop-triggered shield for real time embedded systems university course.
- Low-level embedded firmware (STM32L432KC):
- FreeRTOS.
- Bare metal design analysis:
- Scheduler design, task execution timing and static code analysis.
drop_detect: firmware.
CV Relevance Learning: Online-learning CV Relevance Classifier
📷 Online-learning relevance classifier built on pre-trained computer vision for machine learning university course.
- k-Nearest Neighbours and Incremental Gaussian Naive Bayes relevance prediction model for YOLOv5 detection.
cv_relevance_learning: software.
Setup
This GitHub Pages repository uses submodules to pull in documentation and references.
Quick command to pull changes from remote submodules:
git submodule update --init --recursive --remote
git submodule update --remote --merge